Flyter занялся проектированием профессиональных малых беспилотников
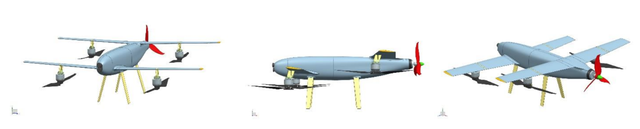
Стартап Flyter расширяет сферу своих интересов на профессиональные малые беспилотники (взлетный вес до 30 кг) и дроны для хобби. Особенность этих проектов заключается в том, что малые беспилотники будут построены по схемам больших БЛА, которые компания разрабатывала до сих пор.
Для этого в компании выделено отдельное направление малых беспилотников (МБЛА) в независимый проект, сформирована линейка моделей взлетным весом 28-30 кг, до 12 кг и до 6 кг, в трех основных сегментах: доставка грузов, мониторинг и аэрофотосъемка, сельское хозяйство.
Стоимость эксплуатации беспилотной авиасистемы опеределяется, прежде всего, затраты на оплату труда оператора. Второй по значимости фактор — это ресурс («назначенный ресурс»). Для летающих крыльев с посадкой на парашюте этот ресурс как правило не превышает 250 часов, а это не так уж много полетов — всего 50-80.
Очевидное решение, которое хотя бы в теории может помочь снизить эксплуатационные затраты хозяйства, использующего БЛА, это создание роботизированной платформы для запуска, приземления, хранения и обслуживания БЛА. Такая платформа позволяет отказаться от использования оператора БЛА и продолить назначенный ресурс БЛА. Парашютное решение приземления при использовании платформы автоматического запуска не годится, здесь предпочтительным является применение БЛА с вертикальным взлетом/посадкой.
Роботизированные платформы для запуска БЛА в мире не новость, их разрабатывают или выпускают компании в разных странах. Можно вспомнить такие компании, как Airmada, Airobotics, American Robotics, Aerovinci, Percepto и другие. В России процесс разработки робоизированной платформы также идет, в частности, ФГБОУ ВО «ТГУ им Г.Р.Державина» разрабатывает универсальные роботизированные платформы УРП при грантовой поддержке Минобрнауки РФ. Идентификатор проекта RFMEFI57717X0284.
Разработка УРП в ТГУ им Г.Р.Державина
Во Flyter занялись вопросом интеграции беспилотников с роботизированными платформами, есть уже ряд эскизных проработок.
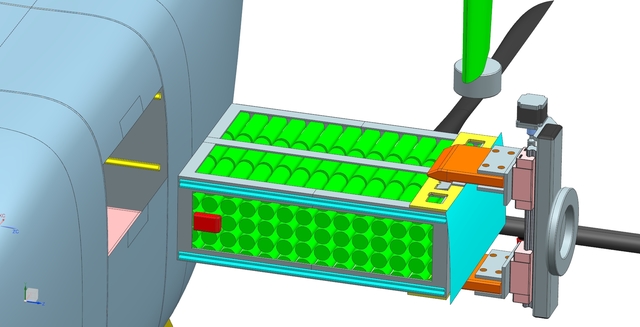
Вот, например, схема замены сборки Li-ion аккумуляторов 18650 мАч.
Это не только автоматические взлет и посадка, это также автоматизированная замена аккумуляторов, полезной нагрузки, загрузка и выгрузка груза, заправка химикалиями бака (в версии для сельского хозяйства). Это регламенты обслуживания, диагностика предполетного и послеполетного состояния. Только такая интеграция обещает превратить БЛА в действительно «беспилотную» систему, в летающего робота.
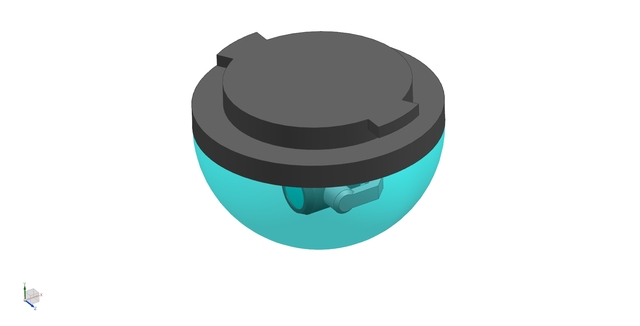
Один из вариантов полезной нагрузки, размещаемый на трехосевом подвесе, — массив камер MAPIR Kermel.
Подвес устанавливается в обтекателе с байонетным креплением. Электрическая коммутация через два разъема типа USB type C.
Обтекатель для камеры. Если ставить камеру без обтекателя это заметно снижает время непрерывного полета беспилотника.
В компании Flyter понимают, что рынок профессиональных МБЛА пока что невелик, особенно в России. Потенциал хобби-рынка намного выше, особенно, если государство постепенно начнет отходить от запретительной практики регулирования рынка БЛА, что рано или поздно произойдет. Во Flyter разрабатывают прототип малого БЛА по схеме ПАК ВВП 420-122 для дальних и продолжительных полетов с гибридной 4K+fpv камерой и взлетным весом до 1 кг. По-задумке, должен получиться недорогой хоббийный дрон с планером, напечатанным на 3D-принтере. В то же время, он будет по-своему уникальным, например, этот аппарат сможет зависнуть над точкой, но его крейсерская скорость сможет достигать 60 км/ч. Расчетное время полета — намного больше, чем у типовых хобби-моделей — более 1.5 часа, протяженность маршрута — порядка 100 км.
—
Редакция RoboTrends.ru связалась с Юрием Солодовниковым, главным конструктором Flyter, который любезно ответил на наши вопросы, связанные с новостями компании:
Как во Flyter переживают режим «самоизоляции»? Сказывается ли ситуация на темпах работы?
ЮС: У нас распределенная команда, мы уже много лет работаем в режиме удаленного доступа, фактически без какого-то «офиса» в традиционном понимании. Ситуация нас практически никак не затронула, мы как работали в своих мастерских, зачастую домашних, так и работаем. Более того, сложившаяся ситуация, похоже, повысила интерес к нашей тематике, к компании, мы стали получать больше звонков. Похоже, работу над нашими проектами сможем ускорить. Особенно по направлению МБЛА.
Мы уже тестировали прототипы хоббийных МБЛА, заканчиваем проектирование модели хоббийного МБЛА. Ожидаем доставки всех заказанных комплектующих и скоро начнем печатать его на 3D-принтере.
Идея, заложенная в проект, проста — мы хотим, с одной стороны, показать возможности нашей схемы решения, с другой стороны — дать любителям возможность летать долго и далеко.
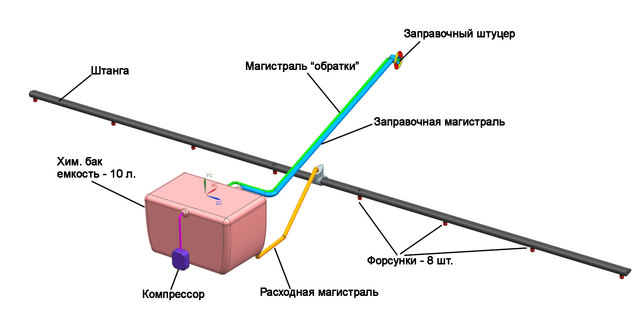
Есть еще одна задумка — большой квадракоптер для сельхозхимии (взлетный вес до 115 кг, бак 50 или 60 литров), по нему ведем обсуждания с потенциальным заказчиком.
Вариант схемы подвесного оборудования для беспилотника-«химика»
В общем, в целом есть ощущение оживления рынка.
Расскажите чуть подробнее о проекте хобби-беспилотников, что там по «начинке» планиуруется?
ЮС: Это конвертопланы, по задумке — c опенсорнсным ПО Inav. Эта быстро набирающая популярность оболочка для настройки полетного контроллера хороша тем, что проще с ним работать, можно сразу загрузить настройки для конкретной модели, плюс поддерживается работа с приемником GPS, что позволяет поддерживать режим автоматического полета «по заданным точкам». Но в Inav еще нет поддержки конвертопланов, хотя разработчики и обещают его добавить. Поэтому начнем с версии под под Ардупилот, поскольку там хорошо разработана тема VTOL, Полетный контроллер обычный для таких беспилотников — Matek F405-CTR.
Как осуществляется финансирование проектов?
ЮС: Это основная для нас проблема на сегодня. Мы пробовали найти инвестиции на осуществление проекта по разработке и началу выпуска малых беспилотников. У нас это не получилось. Пришлось сфокусироваться на тех направлениях, где мы сможем выдать продукт достаточно быстро, опираясь только на собственные средства, которые не так значительны, как хотелось бы. На днях подали заявку на грант, надеемся, что нас поддержат, это позволило бы значительно ускорить разработки.
Что со сроками, когда и что вы планируете представить уже не в виде проектов, а в железе?
ЮС: Хотелось бы выйти на серийное производство. По нашим оценкам, достаточно было бы привлечь инвестирование в размере 15 млн рублей, этого бы хватило, чтобы уже через год представить линейку из трех профессиональных малых беспилотников грузоподъемностью 6, 12 и 28-30 кг, которые были бы готовы к запуску в серийное производство. Есть подробный бизнес-план, есть исполнители, с которыми достигнуты предварительные договоренности по их переходу в проект Flyter. Но этих денег мы пока не нашли и проект «подвис» в некоторой неопределенности.
А потому мы сейчас приоритетно заняты темой хобби-беспилотников, надеемся, что получим от нее какие-то средства. Кроме того, эти БЛА станут «живым демонстратором» потенциала нашей конструкции.
Если к осени 2020 года сможем получить грант в размере 2 млн, то подготовим наборный прототип профессионального БЛА с полезной нагрузкой до 28-30 кг. Ожидаемая готовность прототипа — в начале 2021 года, сможем поднять его в воздух и показывать. Это медленный сценарий развития событий. Если раньше найдется инвестор или окажется успешным проект с хобби-беспилотниками, то, конечно, ускоримся и по профессиональным моделям.
Нас и с большими аппаратами вот уже несколько лет тормозит только отсутствие денег. Только детали для наборного прототипа «тянут» на 450-500 тысяч рублей. Примерно такую сумму мы уже потратили в 2019 году на испытательный стенд и… немного выдохлись финансово. Сейчас приходится параллельно заниматься исполнением подрядов на проектирование, не связанных с нашей основной темой, чтобы было на что жить и заниматься беспилотниками.